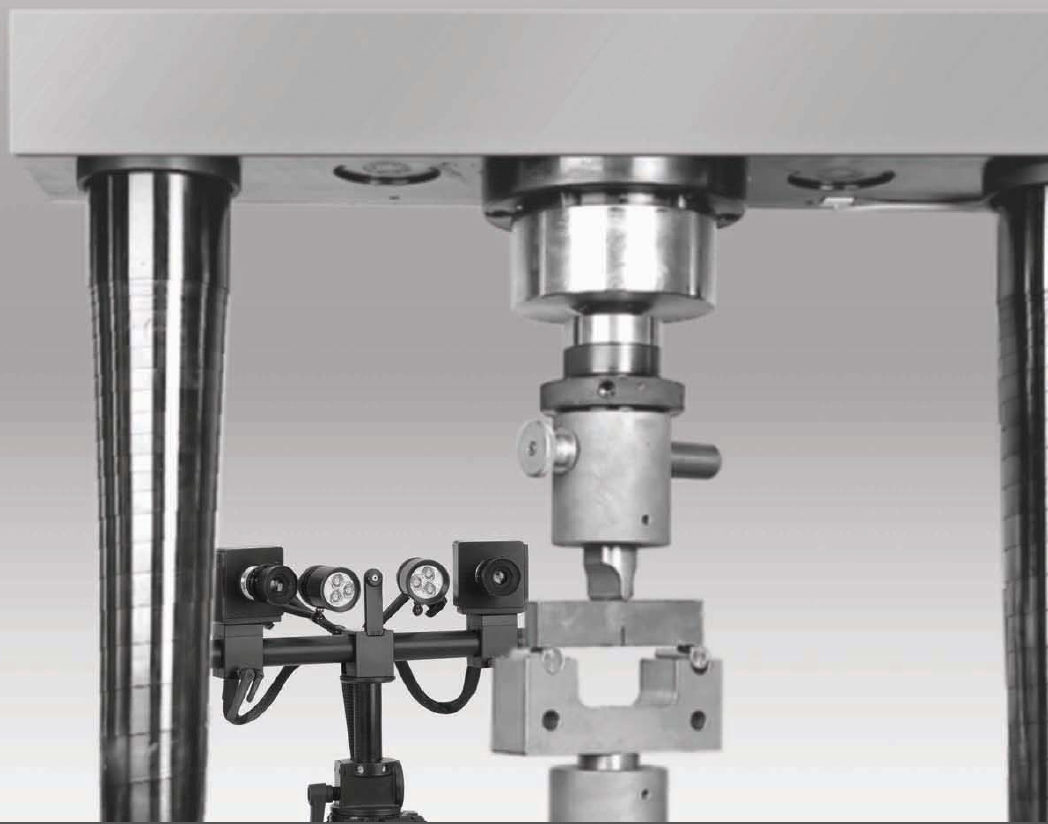
ARAMIS系统采用高分辨率数码相机,在加载过程中,对被测零件表面进行连续的拍照测量。利用简单的标定程序,可以非常准确地确定测量头状态、相机位置和测量范围。同时对测量镜头的光学变形进行补偿。
利用数字相关性技术(DIC)对每组图像进行分析和计算。
在每个相机图像中获得海量的微面片,并计算每个微面片的灰阶分布,从而计算出每个微面片在所有图像中的准确位置,计算精度可达到亚像素级。
利用对测量头上两个相机标定后的数学关系,结合数字图像相关性计算和立体相机光学三角形原理,最终获得每个微面片的三维空间坐标。分析微面片在不同加载阶段的三维空间位置,进而准确地计算出其在X. Y和Z方向上的位移。
 ARAMIS——三维应变光学测量和分析系统.pdf
(1.66 MB, 下载次数: 0)
ARAMIS——三维应变光学测量和分析系统.pdf
(1.66 MB, 下载次数: 0)