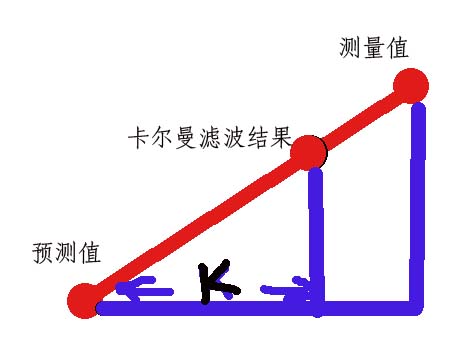
| 原来的程序发现很多错误,所以删掉了不敢说自己掌握了卡尔曼算法。只是死磕卡尔曼一周后的一点心得。最近飞控比较火,卡尔曼顺带也热门起来。不过我没打算要做飞控,用它只是想提高电子称的精度(工作上要用,后来发现并不适合卡尔曼,改回原来的平滑滤波了)。要了解卡尔曼先要扯远一点,算数平均法是我们常用的滤波方式。多采几个样,相加,求平均数x=(a0+a1+a2)/3在这个基础上做一些改进,比如,最近采的样比较重要权重比较高x=a0*0.1+a1*0.3+a2*0.6接着呢又觉得0.1,0.3,0.6系数是固定的,比较蠢,比较木头,能不能根据实际情况自动改变于是就有了自适应滤波牛人卡尔曼(还活着现在)发明了一种“简单的”自适应滤波方法“卡尔曼滤波”卡尔曼算法有两个重点,1,是“预测”,举个例子:飞控里面,我们可以用重力加速传感器测出“现在”相对与地面的角度(重力的方向)。然后就可以“预测” 1秒后 的角度为:“一秒后角度”=“现在角度”+1秒*“旋转角速度”也就是大家说的“数据融合”,如果出现多个数据融合,用矩阵就会更直观一点。幸运的是飞控不是太复杂,不用死啃矩阵。2,“p“值更新这个现在还没搞的很清楚,就不在这里卖了 |