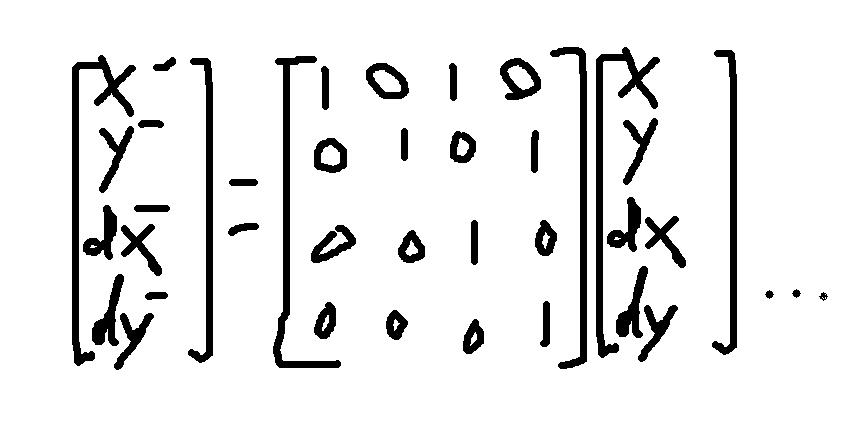
kalman 滤波 演示与opencv代码 在机器视觉中追踪时常会用到预测算法,kalman是你一定知道的。它可以用来预测各种状态,比如说位置,速度等。关于它的理论有很多很好的文献可以参考。opencv给出了kalman filter的一个实现,而且有范例,但估计不少人对它的使用并不清楚,因为我也是其中一个。本文的应用是对二维坐标进行预测和平滑 使用方法: 1、初始化 const int stateNum=4;//状态数,包括(x,y,dx,dy)坐标及速度(每次移动的距离)const int measureNum=2;//观测量,能看到的是坐标值,当然也可以自己计算速度,但没必要Kalman* kalman = cvCreateKalman( stateNum, measureNum, 0 );//state(x,y,detaX,detaY) 转移矩阵或者说增益矩阵的值好像有点莫名其妙 [cpp] view plaincopyprint? - float A[stateNum][stateNum] ={//transition matrix
- 1,0,1,0,
- 0,1,0,1,
- 0,0,1,0,
- 0,0,0,1
- };
看下图就清楚了 X1=X+dx,依次类推所以这个矩阵还是很容易却确定的,可以根据自己的实际情况定制转移矩阵 同样的方法,三维坐标的转移矩阵可以如下 [cpp] view plaincopyprint? - float A[stateNum][stateNum] ={//transition matrix
- 1,0,0,1,0,0,
- 0,1,0,0,1,0,
- 0,0,1,0,0,1,
- 0,0,0,1,0,0,
- 0,0,0,0,1,0,
- 0,0,0,0,0,1
- };
当然并不一定得是1和0 2.预测cvKalmanPredict,然后读出自己需要的值3.更新观测矩阵4.更新CvKalman 只有第一步麻烦些。上述这几步跟代码中的序号对应 如果你在做tracking,下面的例子或许更有用些。 [cpp] view plaincopyprint? - #include <cv.h>
- #include <cxcore.h>
- #include <highgui.h>
-
- #include <cmath>
- #include <vector>
- #include <iostream>
- usingnamespace std;
-
- constint winHeight=600;
- constint winWidth=800;
-
-
- CvPoint mousePosition=cvPoint(winWidth>>1,winHeight>>1);
-
- //mouse event callback
- void mouseEvent(int event, int x, int y, int flags, void *param )
- {
- if (event==CV_EVENT_MOUSEMOVE) {
- mousePosition=cvPoint(x,y);
- }
- }
-
- int main (void)
- {
- //1.kalman filter setup
- constint stateNum=4;
- constint measureNum=2;
- CvKalman* kalman = cvCreateKalman( stateNum, measureNum, 0 );//state(x,y,detaX,detaY)
- CvMat* process_noise = cvCreateMat( stateNum, 1, CV_32FC1 );
- CvMat* measurement = cvCreateMat( measureNum, 1, CV_32FC1 );//measurement(x,y)
- CvRNG rng = cvRNG(-1);
- float A[stateNum][stateNum] ={//transition matrix
- 1,0,1,0,
- 0,1,0,1,
- 0,0,1,0,
- 0,0,0,1
- };
-
- memcpy( kalman->transition_matrix->data.fl,A,sizeof(A));
- cvSetIdentity(kalman->measurement_matrix,cvRealScalar(1) );
- cvSetIdentity(kalman->process_noise_cov,cvRealScalar(1e-5));
- cvSetIdentity(kalman->measurement_noise_cov,cvRealScalar(1e-1));
- cvSetIdentity(kalman->error_cov_post,cvRealScalar(1));
- //initialize post state of kalman filter at random
- cvRandArr(&rng,kalman->state_post,CV_RAND_UNI,cvRealScalar(0),cvRealScalar(winHeight>winWidth?winWidth:winHeight));
-
- CvFont font;
- cvInitFont(&font,CV_FONT_HERSHEY_SCRIPT_COMPLEX,1,1);
-
- cvNamedWindow("kalman");
- cvSetMouseCallback("kalman",mouseEvent);
- IplImage* img=cvCreateImage(cvSize(winWidth,winHeight),8,3);
- while (1){
- //2.kalman prediction
- const CvMat* prediction=cvKalmanPredict(kalman,0);
- CvPoint predict_pt=cvPoint((int)prediction->data.fl[0],(int)prediction->data.fl[1]);
-
- //3.update measurement
- measurement->data.fl[0]=(float)mousePosition.x;
- measurement->data.fl[1]=(float)mousePosition.y;
-
- //4.update
- cvKalmanCorrect( kalman, measurement );
-
- //draw
- cvSet(img,cvScalar(255,255,255,0));
- cvCircle(img,predict_pt,5,CV_RGB(0,255,0),3);//predicted point with green
- cvCircle(img,mousePosition,5,CV_RGB(255,0,0),3);//current position with red
- char buf[256];
- sprintf_s(buf,256,"predicted position
 =,=)",predict_pt.x,predict_pt.y); =,=)",predict_pt.x,predict_pt.y); - cvPutText(img,buf,cvPoint(10,30),&font,CV_RGB(0,0,0));
- sprintf_s(buf,256,"current position =,=)",mousePosition.x,mousePosition.y);
- cvPutText(img,buf,cvPoint(10,60),&font,CV_RGB(0,0,0));
-
- cvShowImage("kalman", img);
- int key=cvWaitKey(3);
- if (key==27){//esc
- break;
- }
- }
-
- cvReleaseImage(&img);
- cvReleaseKalman(&kalman);
- return 0;
- }
kalman filter 视频演示: http://v.youku.com/v_show/id_XMjU4MzEyODky.html demo snapshot: |


 360网站安全检测平台
360网站安全检测平台


 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 分享
分享 淘帖
淘帖 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜


共 4 个关于本帖的回复 最后回复于 2024-1-22 12:42